

-
-
Контакты











Система автоматического управления электровозом
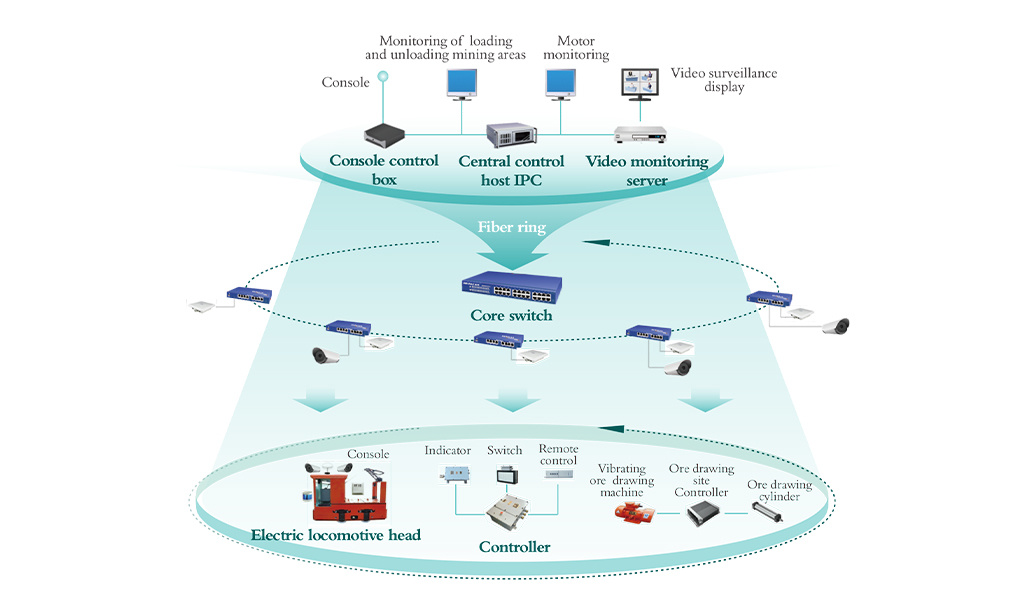
Система автоматического вождения горного железнодорожного оборудования основана на технологии ИИ и предназначена для беспилотного управления горными транспортными средствами, такими как электровозы и монорельсовые краны, в условиях низкой освещенности и взрывоопасности подземных шахт. Система использует высокоскоростную беспроводную связь, волоконно-оптическую кольцевую сеть или технологию 5G в качестве платформы передачи данных, опираясь на разработанную компанией систему мониторинга горных перевозок в качестве основы безопасности. Она использует технологии точного позиционирования подземных локомотивов, ГИС, машинного зрения, UWB-позиционирования с точностью до сантиметра и технологии обеспечения безопасности и аварийного реагирования локомотивов, а также оснащена уникальным алгоритмом интеллектуального управления локомотивом, обеспечивая беспилотную работу по погрузке, транспортировке и разгрузке материалов и руды.
Функции системы

Технология обнаружения уровня материала в шахте и бункерах Используя разработанный нашей компанией X-диапазонный радар в сочетании с однолучевым лазером, автоматически |
Мониторинг уровня материала и заклинивания в зоне разгрузки Датчик уровня материала в режиме реального времени контролирует уровень материала в зоне разгрузки. Когда транспортное средство приближается к зоне разгрузки, |
|
Автоматическая погрузка Технология автоматической погрузки является ключевым этапом автономной работы локомотива, как под землей, так и на |
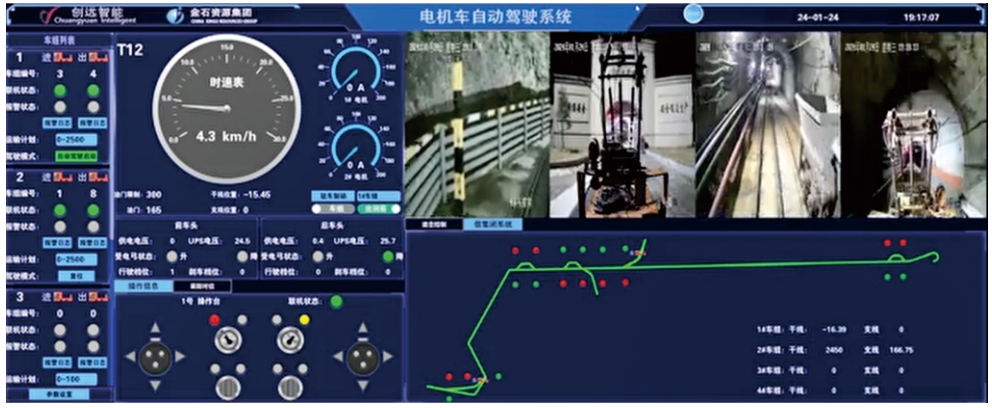
Управление беспилотным движением локомотива Бортовой контроллер получает команды от системы центрального удаленного управления через сеть, автоматически регулируя |

Автономный круиз-контроль локомотива На основе принципа круиз-контроля создается модель круиз-контроля транспортного средства (адаптивная модель круиз-контроля). В соответствии с командами движения, выдаваемыми моделью программного обеспечения для оптимизации производства, с учетом объективных условий пути/дороги, т.е. состояния прямого/криволинейного участка пути впереди, необходимости объезда и т.д., обеспечивается адаптация движения к пути и командам диспетчера, автономная регулировка скорости движения, что позволяет достичь автономной работы на всех этапах погрузки, движения и разгрузки. Это является основой управления одним человеком несколькими локомотивами.
|
|



Обеспечиваем автономную работу интеллектуального оборудования
Комплексное решение для горнодобывающей промышленности
Чем мы можем вам помочь?
Адрес: г. Чанша, зона высоких технологий, проспект Юэлу Сидао, 2450, технопарк Хуанчуан, корпус C-3
Copyright © 2025 Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.