

-
-
Контакты











Автоматизированная система управления транспортными средствами под землей
Система автономного управления подземными транспортными средствами использует передовые технологии сенсоров, искусственный интеллект и интеллектуальное управление для обеспечения автономного движения и беспилотного управления подземными транспортными средствами, а также передовые технологии беспроводной связи, дистанционного управления и визуализации для точной работы по разгрузке горной породы в шахте.
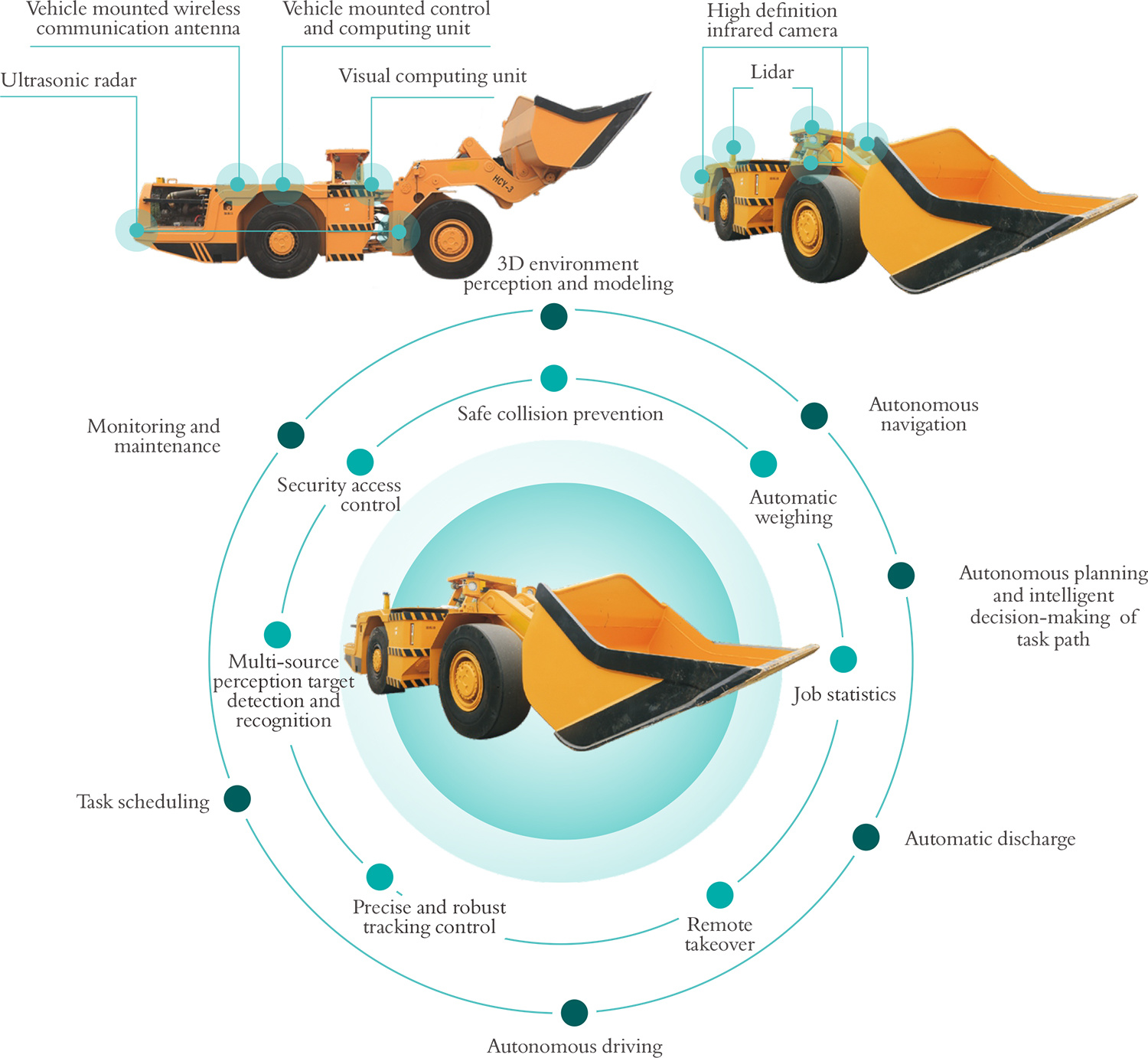
Функции системы

3D-восприятие и моделирование окружающей среды Оснащен многолучевым лидаром для сканирования и моделирования выработок в реальном времени с созданием визуализированной карты, восприятия окружающей среды и отслеживания движения транспортного средства. |
Автономное планирование маршрута и интеллектуальное принятие решений Система в процессе обучения в реальном времени собирает данные о восприятии окружающей среды, данные о местоположении и данные о маршруте работ |
|
Мониторинг и техническое обслуживание Диагностика неисправностей в реальном времени и визуальные световые и текстовые подсказки помогают быстро определить место и состояние неисправности, интегрированы напоминания о техническом обслуживании и профилактическом обслуживании, регулярное профилактическое обслуживание и ремонт, сокращение времени технического обслуживания и увеличение эффективного рабочего времени. |
Точное и устойчивое управление по траектории Используются высокоточные, высокоскоростные и высоконадежные технологии управления рулевым управлением и приводом тормозов для |

Дистанционное управление Дистанционная многофункциональная платформа управления, включающая в себя кнопки управления, рукоятки и педали, интегрированные в подлокотники водительского сиденья, воссоздающие реальную кабину управления, жидкокристаллический экран для отображения информации о местоположении транспортного средства в шахте в реальном времени, скорости движения, информации о полосе движения, угла подъема и т. д., карты движения, маршрута и многоугольного изображения в реальном времени с камер видеонаблюдения, оператор может в любое время взять на себя управление подземным транспортным средством. |
Статистика работ Статистика фактических данных о работе, автоматическое отслеживание объема добычи полезных ископаемых, ежедневные, еженедельные, ежемесячные отчеты о производстве для принятия решений в производстве. |
|
Многосенсорное обнаружение и распознавание целей С помощью лидара и стереокамеры в реальном времени воспринимаются данные об окружающей среде, с помощью технологии распознавания изображений
|
Безопасность В процессе автоматического движения транспортное средство приостанавливает работу в следующих случаях: лидар или |



Обеспечиваем автономную работу интеллектуального оборудования
Комплексное решение для горнодобывающей промышленности
Чем мы можем вам помочь?
Адрес: г. Чанша, зона высоких технологий, проспект Юэлу Сидао, 2450, технопарк Хуанчуан, корпус C-3
Copyright © 2025 Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.