

-
-
Контакты











Система автономного вождения автомобилей на открытом воздухе
Добыча полезных ископаемых открытым способом является основным методом транспортировки в открытых горных разработках и важным фактором, влияющим на производство. Компания Hunan Chuangyuan разработала автономную систему управления беспилотными транспортными средствами для открытых горных работ, используя технологии многосенсорного слияния, высокоточной RTK-позиционирования, точного и надежного управления траекторией, управления шасси и искусственного интеллекта, способствуя созданию интеллектуальных горных разработок и осуществлению беспилотной транспортировки.
|
Самосвалы для открытых работ |
Погрузчик |
Бульдозер |
Автоцистерна |




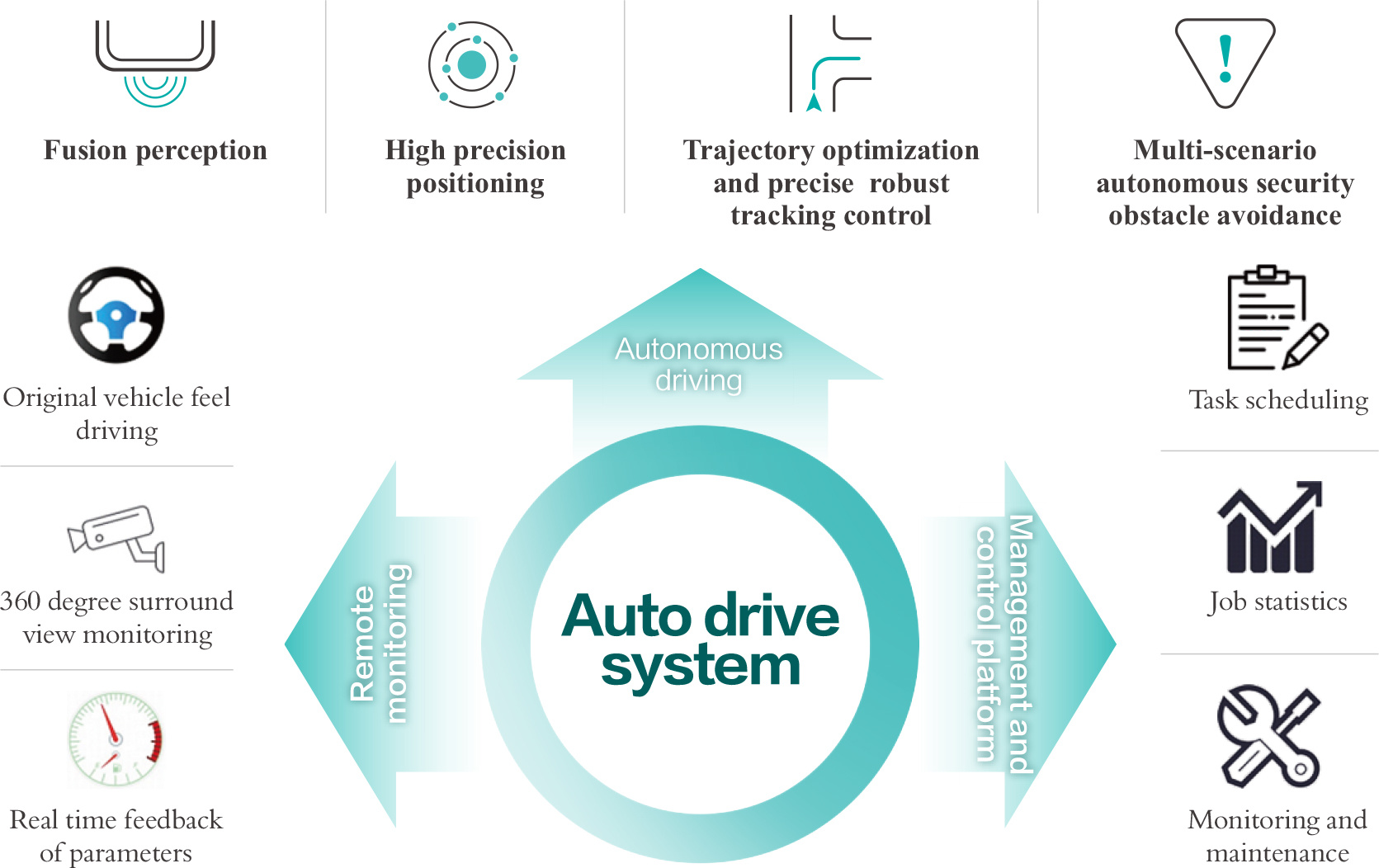
Функции системы

Слияние данных сенсоров Используя лидар, камеры распознавания изображений и миллиметровые радары, осуществляется восприятие и слияние данных. Разработан алгоритм подавления шумов LDA для работы в условиях запыленности, обеспечивающий круговой обзор оборудования на 360 градусов и сохранение возможности обнаружения пешеходов, стационарных объектов (дорожные знаки, столбы и т.д.) и движущихся препятствий (большие камни, кучи материалов и т.д.) в условиях легкой запыленности, мелкого дождя и снега. |
Безопасность Во время нормальной работы транспортное средство использует систему восприятия для обнаружения инфраструктуры, статических препятствий (большие камни и т.д.) и динамических препятствий (пешеходы, встречные транспортные средства) и выполняет соответствующие стратегии предотвращения столкновений, такие как уступка дороги более тяжелым транспортным средствам при встрече, экстренное торможение при приближении пешеходов, экстренное торможение при приближении к краю электронного ограждения (например, ступеньки) на безопасном расстоянии, а также снижение скорости и остановка у обочины при потере связи с транспортным средством или удаленным оператором, если это безопасно. |
|
Высокоточная локализация Высокоточная глобальная спутниковая RTK-позиционирование обеспечивает сантиметровое слежение за траекторией, а коррекция с помощью дальномера позволяет обеспечить высокоточную и стабильную парковку. |
Точное и стабильное управление Используя высокоточную, высокоскоростную и надежную технологию управления рулевым управлением и приводом, создается точная кинематическая и динамическая модель, а также проектируется контроллер продольного и поперечного слежения в реальном времени для обеспечения точного и стабильного управления транспортным средством. |
|
Оптимизация траектории На основе фактических условий работы горнодобывающего оборудования разработан алгоритм планирования маршрута DDAS (D - поперечное безопасное расстояние, D - продольное безопасное расстояние, A - продольная базовая линия транспортного средства, S - продольная базовая линия погрузочного оборудования), обеспечивающий оптимальное соответствие положения транспортного и погрузочного оборудования. |
Автономное вождение Транспортное средство может автоматически запускаться, ускоряться, тормозить, поворачивать и разгружаться по запланированному маршруту, обеспечивая беспилотную циклическую транспортировку. |
|
Дистанционное управление Многофункциональная удаленная платформа управления включает в себя кнопки, рукоятки и педали, интегрированные в подлокотники водительского сиденья, воссоздавая реальную кабину водителя, а также передний информационный экран транспортного средства (скорость, частота вращения, давление масла и т.д.) и экран мониторинга изображения транспортного средства на 360 градусов. Сопоставление с идентификатором транспортного средства позволяет в любое время вмешиваться в управление любым грузовиком с функцией автономного вождения. |
Планирование задач На основе производственного плана вводится план транспортировки для каждого транспортного средства. Система автоматически выполняет производственные задачи, позволяя при необходимости осуществлять ручное перераспределение, приоритет которого выше, чем у автоматического распределения задач. |




Обеспечиваем автономную работу интеллектуального оборудования
Комплексное решение для горнодобывающей промышленности
Чем мы можем вам помочь?
Адрес: г. Чанша, зона высоких технологий, проспект Юэлу Сидао, 2450, технопарк Хуанчуан, корпус C-3
Copyright © 2025 Hunan Chuangyuan HIGH-TECH Machinery Co., Ltd.